ROBUST ADAPTIVE CONTROL DESIGN FOR UNMANNED HELICOPTER TREX-600E AT HOVER AND POSITION TRACKING. (theoretical and applied thesis):
MSc Thesis Summary PDF in English (5-4-2018)
-
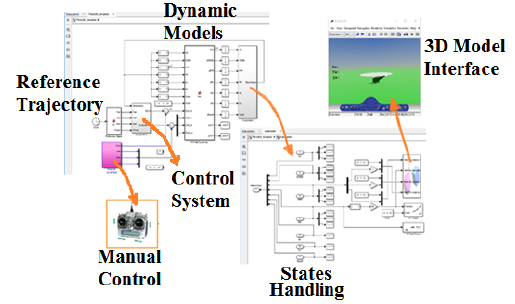
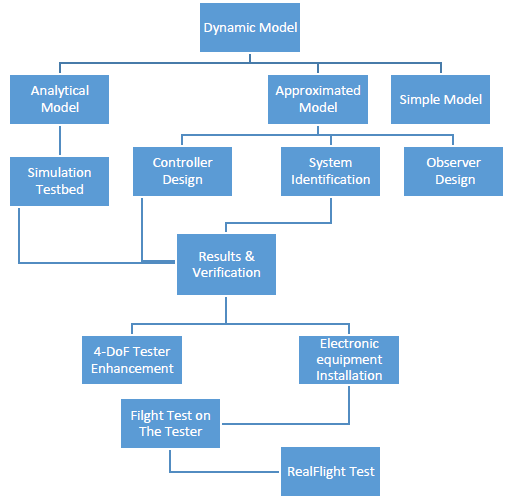
Modeling and Controller Design
-
Simulation (MATLAB/Simulink)
-
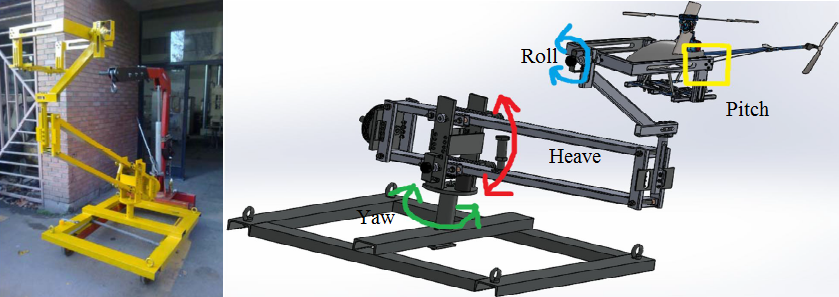
A 4 DoF tester with sensors and an electric circuit is used: Arduino + 2 rotary encoders for pitch and yaw measurement + 2 Pot for heave and yaw measurment
-
ATxmega128A1 + Raspberry pi 3 with MATLAB Raspberry toobox + navigation sensor are used for real tests