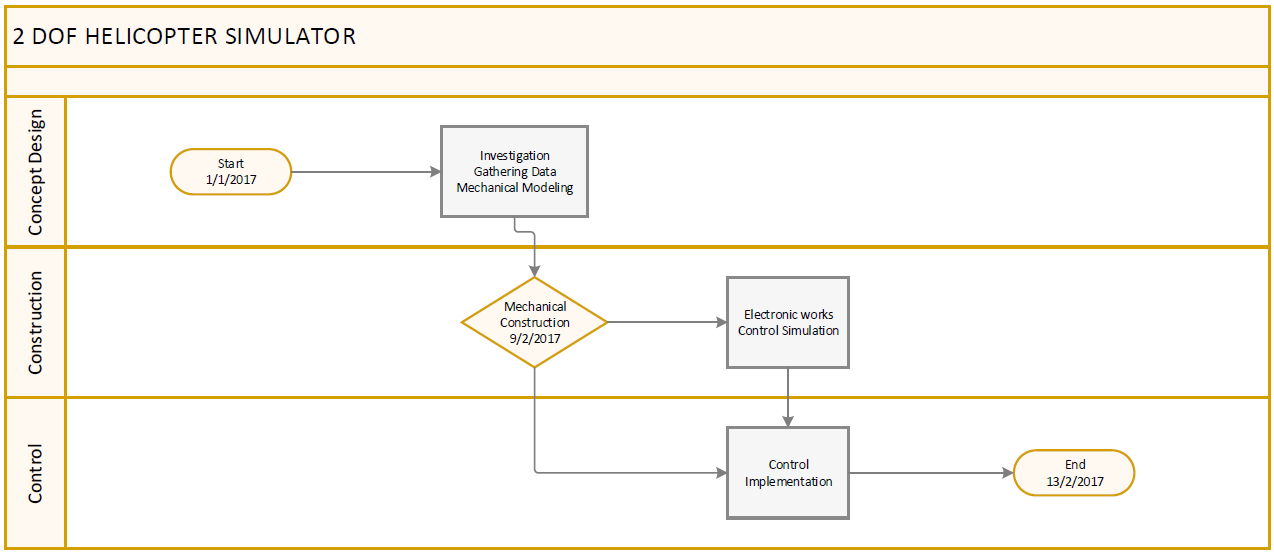
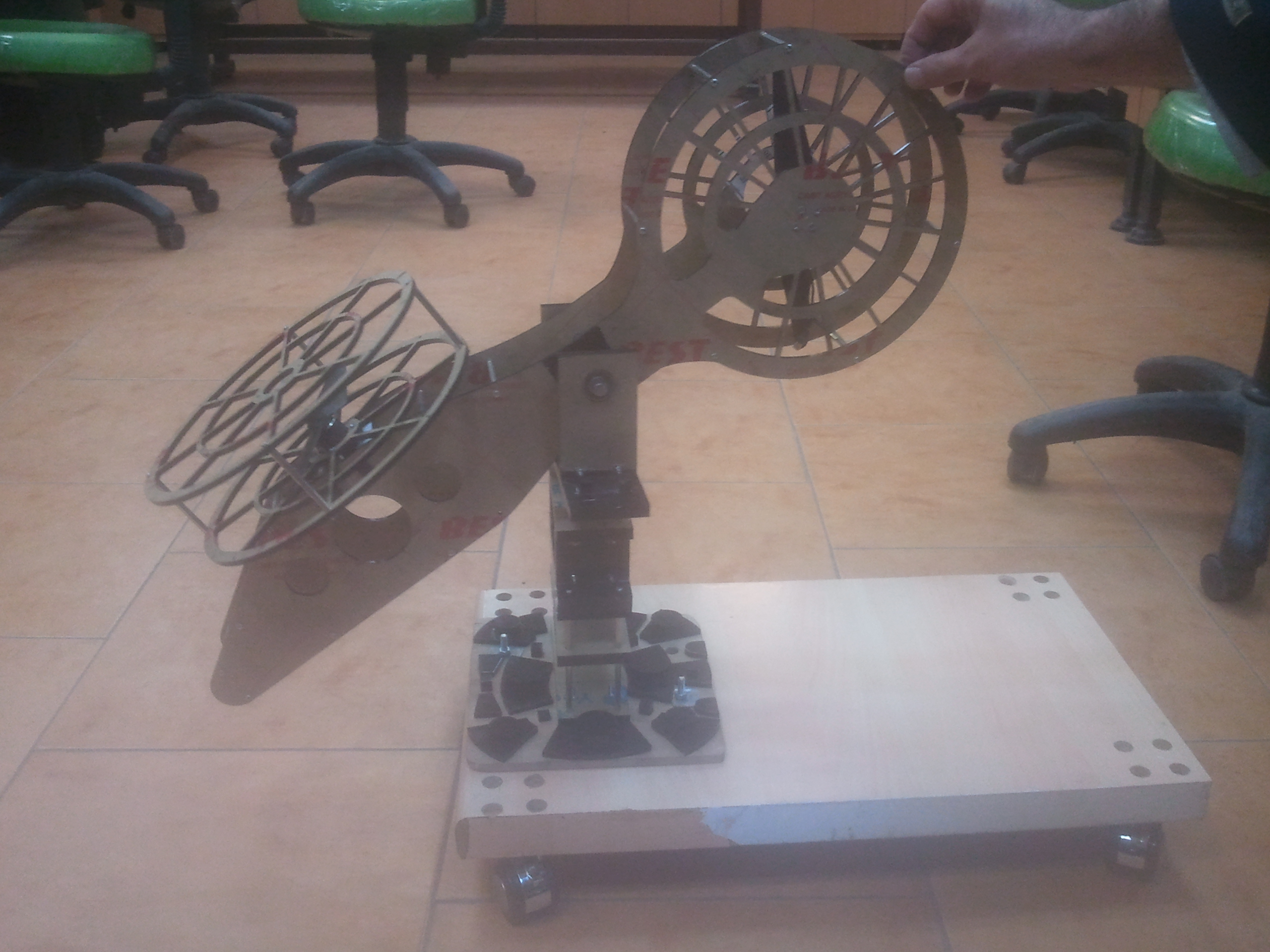
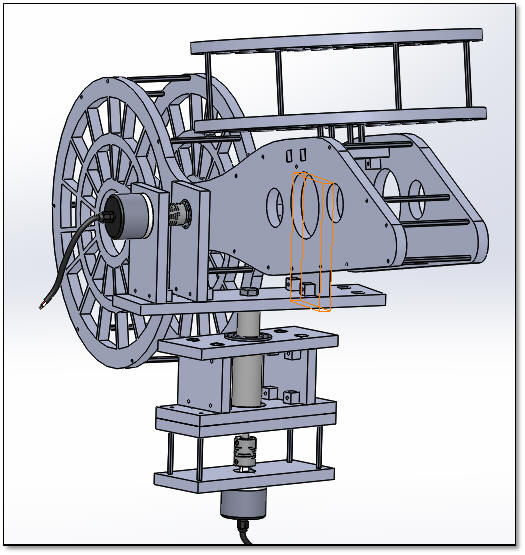
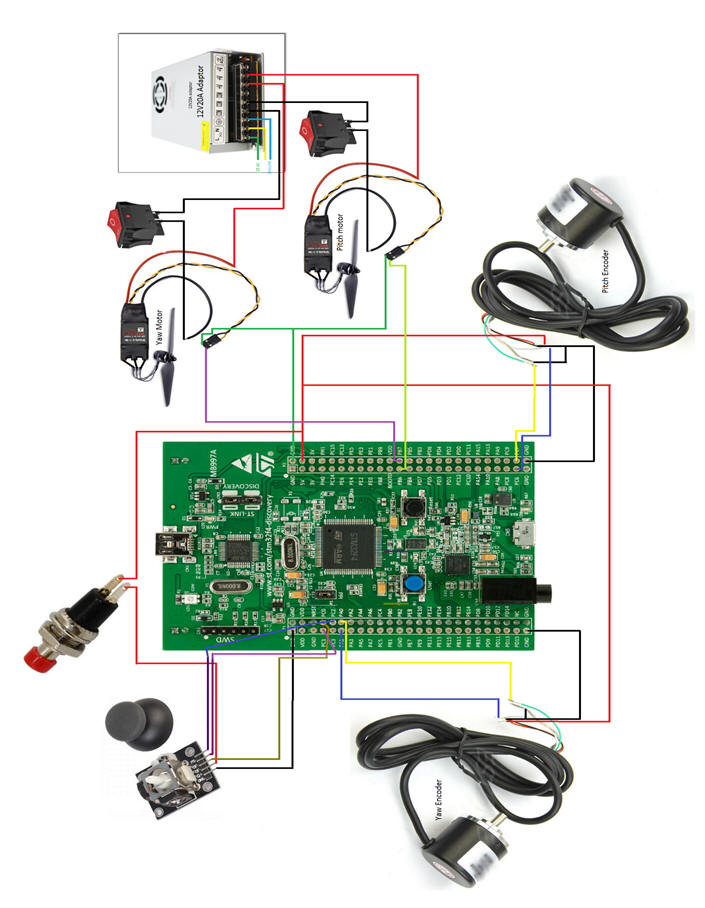
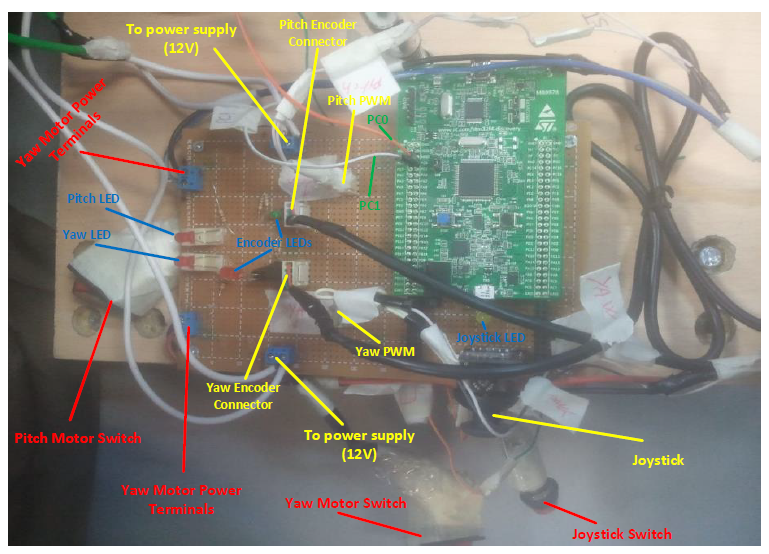
Designing, construction, and control of a 2DOF helicopter simulator. The aim of this simulator is altitude control (control of pitch and yaw angles) by the means of LQR position controller using a linear model of the system. Discovery board with STM32F407VGT6 ARM microcontroller was used to apply the control algorithm, SolidWorks was used to design the mechanical structure, two brushless motors and two encoders were used as actuators and sensors respectively.

|
Units |
Value |
Parameter |
Item |
|
Kg.m2 |
*0.049824597 |
Rotational Inertia about Pitch Axis, Jpp |
Body |
|
Kg.m2 |
*0.048887167 |
Rotational Inertia about Yaw Axis, Jyy |
|
|
mm |
736.9 |
Total Length |
|
|
cm |
21.55 |
Distance from pivot to Pitch motor (L) |
|
|
cm |
20 |
Distance from pivot to Yaw motor (L’) |
|
|
Kg |
1.1 |
Base Frame Mass (excluding props/motors) |
|
|
cm |
5.403 |
horizontal distance of the center of mass from the pivot, Rc |
|
|
Kg |
1.3 |
Base Frame Mass With yoke |
|
|
N/A |
0.0098 |
Torque Constant |
Motor & Propeller Assembly |
|
Nm/ % |
0.0017 |
PWM-Reaction Torque Constant |
|
|
N/% |
0.1408 |
PWM-Force Constant |
|
|
cm |
24.13 |
Diameter of propeller (9.5’) |
|
|
cm |
11.43 |
Pitch of propeller (4.5’) |
|
|
|
360 |
Pulses per revolution |
Encoder |
|
|
1800 count/rev |
+5 to 24vbdc ( recommend +15vdc maximum ) |