Endoscopy is a medical operation in which a camera is sent into the patient’s body and the physician starts taking pictures at specified times. In the traditional endoscopic procedure, a camera is sent into the body by a guiding wire. This can cause severe pain to the patient. In the newer method, a camera is mounted on a small capsule and the patient swallows the capsule. Then the camera inside the capsule starts taking photos and sends them out. This procedure, in addition to being painless, allows the physician to access the innermost parts of the body or the digestive tract.
In capsule endoscopy, unlike the older method, one has to find the position and orientation of the capsule at any given moment. This helps the physician know which part of the digestive system each picture belongs to. Capsule positional information can also be used as an input for external control systems. Control of the capsule and finding its position and direction is done using magnetic fields.
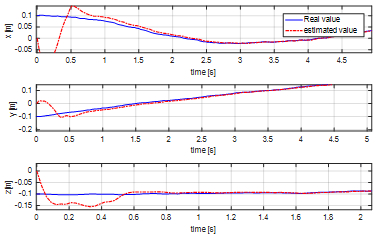
In this paper, a magnetic dipole is considered inside a small capsule that will achieve the position of the capsule using an array of magnetic sensors. It is also possible to obtain a more accurate positioning of the capsule using the dynamics of the capsule motion and the nonlinear Kalman filter.
Project members: Ali Mazinani
Publication: Mazinani A, Pishkenari HN. Observation of a Magnetic Particle Moving in a Fluid Using Extended Kalman Filter. In2019 7th International Conference on Robotics and Mechatronics (ICRoM) 2019 Nov 20 (pp. 162-166). IEEE.

AI Website Builder